


PUDU D5
Pudu Robotics · 2025
Каталог робототехники — характеристики, обзоры, сравнения
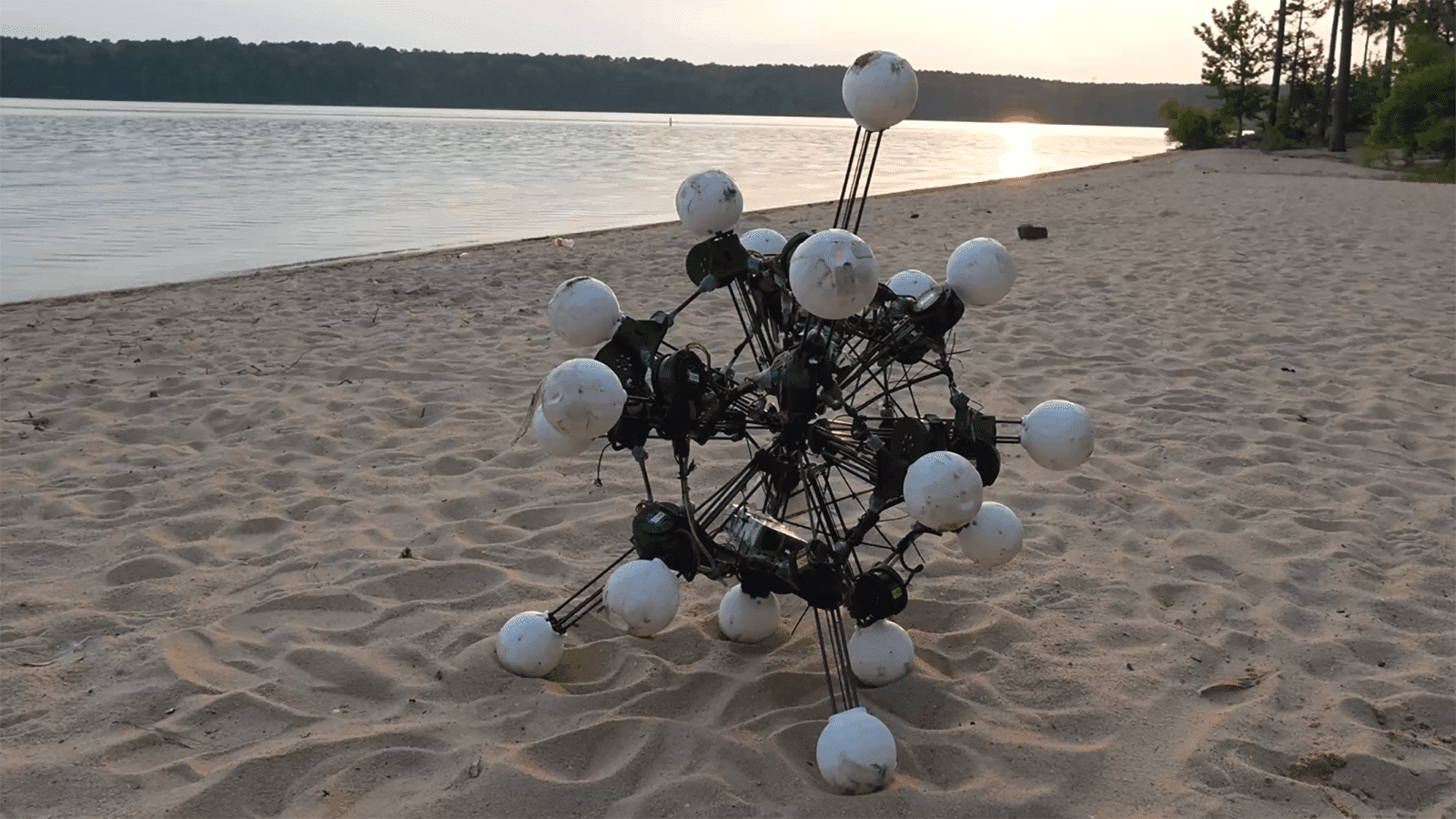
Робот Argus из Duke University: 20 телескопических ног, камеры глубины и конструкция, обеспечивающая одинаковое ускорение в любом направлении. Разбираем, как это устроено и зачем.
Argus — исследовательский робот, разработанный в General Robotics Lab Университета Дьюка и опубликованный в мае 2026 года в журнале Science Robotics (DOI: 10.1126/scirobotics.aec1725). Внешне он напоминает морского ежа: 20 модульных телескопических ног расходятся от центрального корпуса, расположенных в вершинах правильного додекаэдра. На конце каждой ноги — камера глубины, что даёт роботу сплошной обзор во всех направлениях одновременно.
В основе конструкции лежит принцип динамической изотропии — математически формализованная метрика от 0 до 1, показывающая, насколько равномерно робот может ускорять центр масс в любую сторону пространства. Большинство современных квадрупедов и гуманоидных роботов набирают ниже 0,6. Argus набирает 0,91, что близко к теоретическому максимуму. Чтобы прийти к этой форме, команда просчитала более 1 500 вариантов конфигурации в симуляции.
У робота нет фиксированного переда или зада: он способен двигаться и действовать в любом направлении без переориентации корпуса. Управление строится на нейронной сети, обученной в симуляции с последующим переносом на реальное железо.
Проект финансируется программами DARPA FoundSci и TIAMAT, а также Исследовательским управлением Армии США и программой STRONG Армейской исследовательской лаборатории. Робот позиционируется как фундаментальное исследование в области научных роботов; двойное применение явно не заявлено, однако военное финансирование это не исключает.
Вместе со статьёй команда выпустила набор симуляционных данных по 1 500 морфологиям — чтобы другие исследовательские группы могли самостоятельно исследовать пространство конструктивных решений. Работы ведутся в рамках долгосрочной программы General Robotics Lab по созданию машин, способных самостоятельно открывать закономерности окружающего мира — направление, которое лаборатория называет Discovery Robotics.
